Abstract
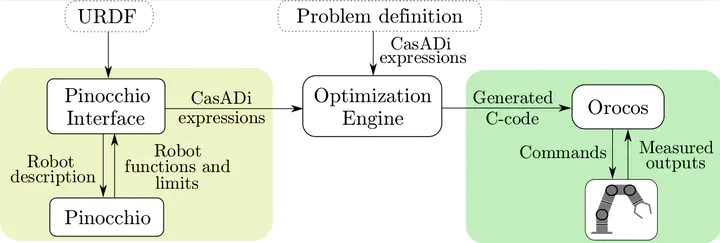
This paper presents an open toolchain tailored for deployment of nonlinear model predictive control for serial robots. The toolchain provides a direct workflow from problem definition to solution deployment on a serial robot based on open-source software. Thus, we provide an insightful selection of modules for rigid body dynamics, numerical optimization, and robot control, and a strategy to make them cooperate in a way that is efficient in terms of computation and engineering time. A detailed numerical study is presented for path-following MPC on a 7-degrees-of-freedom robot, showing the efficiency and ease of use of the presented toolchain while comparing its modules with other tools.
Alejandro Astudillo
Postdoctoral Researcher
Passionate about robotics and outer space. Researching on real-time motion planning and fast model predictive control for robots. Other research topics include execution of control and estimation algorithms on a smartphone-based flight controller for a quadrotor.